{kind=link}
{kind=link}
Introduction video : (http://gofile.me/6XLtq/6ItPPRwxU)
프로젝트 진행시 어려웠던 점을 기록하여 같은 실수를 두 번 반복하지 않도록 하자.
가속도 센서의 가속도를 카메라의 위치에 맵핑하는 것을 학습하고 테스트 시에는 가속도 센서의 가속도만으로 측정할 수 있게 된다.사용한 센서 : Xsens社의 Xsens Dot
Xsens는 MEMS(Micro-Electro-Mechanical-System) 센서회사 중 가장 비싸지만 정확하다.
프로젝트 초기 (06/26 ~ 07/20) :
Xsens 센서 사용법을 익히고 센서 데이터를 컴퓨터로 수신하는 방법을 학습.
관련 논문[1][2][3]을 읽으며 가속도 센서의 가속도로 정확한 위치를 추정(Dead reckoning)이 단순하게 생각했던 것 과는 달리 센서 학계의 궁극적인 목표에 해당할 정도로 어려운 문제임을 깨달음
1차 발표 (07/21) :
발표 컴퓨터에 ppt 폰트가 다운로드 되어 있지않아 글씨가 깨진채로 발표를 하게 되었다.
계속되는 시도(07/22 ~ 08/01) :
이중 적분에 아직 미련을 버리지 못했다.
방법 변경(08/02 ~ 08/23) :
기존의 이중 적분 방법에서 카메라의 위치로 맵핑하는 방법으로 변경 (원판 추적 알고리즘을 개발하기에 시간이 없어서 모바일 앱 WL-Analysis를 사용)
수직 방향, 수평 방향에 센서 가속도 -> LSTM -> 카메라 위치 를 학습시키기로 결정.
(08/16) : 깃허브를 보며 원판 추적 알고리즘을 개발[5] (그러나 이론을 제대로 이해하지 않고 만들어서 수정을 거치게 되었다.)
등잔 밑이 어두웠다 (08/23 ~ 08/24) :
최종 발표 하루 전 수직 방향의 경우 별다른 맵핑 없이 신호 처리적 관점으로 해결할 수 있음을 확인[4]
최종 발표 (08/25):
호재가 발표를 아주 잘했다. 며칠 후 한 교수님 께서 컨택을 요청하셨는데, 더 보완해야겠다.
[1] RIDI: Robust IMU Double Integration (Hang Yan) [2] 허리 장착 기반의 IMU 센서를 이용한 3D 보행자 위치 추정 알고리즘 연구 (송 준 우) [3] IMU Acceleration Drift Compensation for Position Tracking in Ambulatory Gait Analysis (Serhat İkizoğlu) [4] 가속도계를 이용한 파고 알고리즘 개선에 관한 연구 (정 동 근)
[5] https://github.com/GalaxyOverMe/barbell_track_path
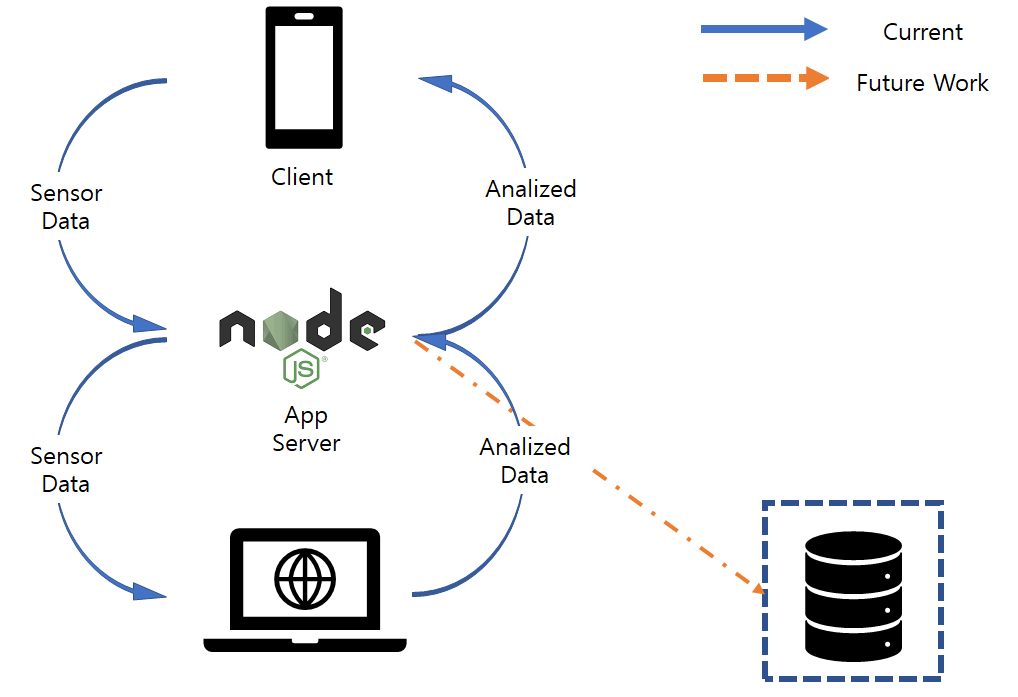
안드로이드 <-> 파이썬 서버간 통신 구축(Flask 이용)안드로이드에서 OkHttp3를 이용하여 파이썬에 csv파일을 post형태로 보내고 파이썬에서 csv파일을 입력받아 결과를 분석하고 안드로이드에 결과를 보내준다.