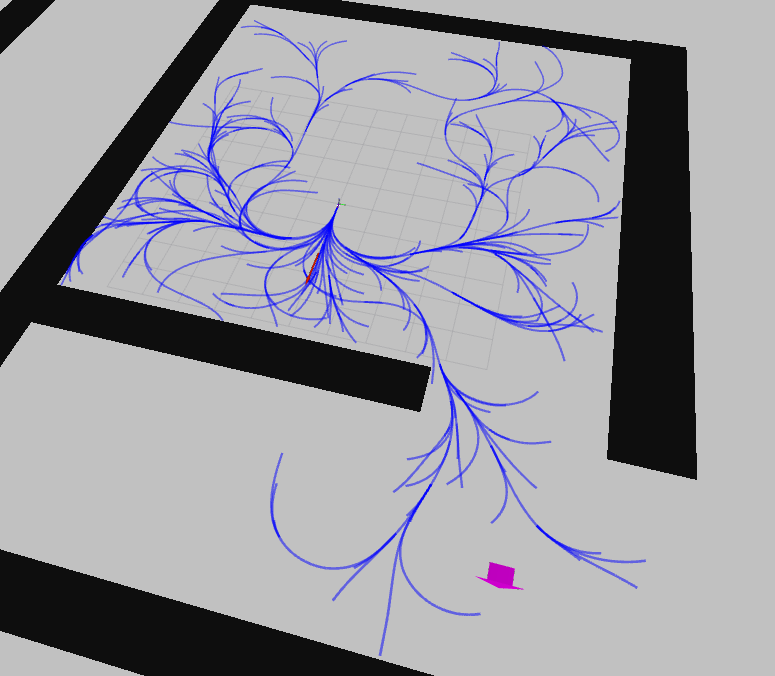
Implementation of SST path planning algorithm based on article:
Li, Y., Littlefield, Z., & Bekris, K. E. (2016). Asymptotically optimal sampling-based kinodynamic planning. The International Journal of Robotics Research, 35(5), 528-564.
Car's kinematic model is used.
mkdir -p catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/dmn-sjk/sst_path_planning.git sst
cd ~/catkin_ws
catkin_make
source devel/setup.bash
chmod +x ~/catkin_ws/src/sst/scripts/*.pyConfiguration in simulation.launch file
roslaunch sst simulation.launchsudo apt-get install ros-noetic-teleop-twist-keyboard
roslaunch sst car_simulation.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py