



- 🔭 I’m currently working with 🦾Robotics Manipulators (Kitchen Automation) @ 🍟Miso Robotics, Pasadena, California
- 💻 Python/C++ with NVIDIA's Omniverse platform (Isaac Sim, curobo Motion Planning Library)
- 🚀 Previously worked with Computer Vision & Robotics (Autonomous Drones) @Speedbird.Aero
- 💻 C++/Python for Computer Vision and NodeJS for client-side software
- 💚 I love working with Robotics/Computer Vision/Machine Learning
- 📫 How to reach me: via email or LinkedIn (links also below)
- 😄 Pronouns: he/him


-
Journal of Control, Automation and Electrical Systems (JCAE 2021) (English): Autonomous Navigation System for a Delivery Drone
-
Brazilian Conference of Automatics (CBA 2020) (Portuguese): "Development of an autonomous drone for cargo delivery tasks"
-
Latin American Robotics Symposium (LARS 2020) (English): Investigation of Visual Reconstruction Techniques Using Mobile Robots in Confined Environments
-
IEEE International Conference on Image Processing (ICIP 2018) (English): Visual-Quality-Driven Learning for Underwater Vision Enhancement
-
Paper published at Journal JCAE (2021) (English)
-
Paper published at Conference CBA (2020) (Portuguese)



-
Paper published at LARS (2021) (English)






- GitHub Repo: link
- Simple Demo of the Fetch Robot n the video below. Not the actual task performed.
fetch-robot-grasper-16x-speed.mp4
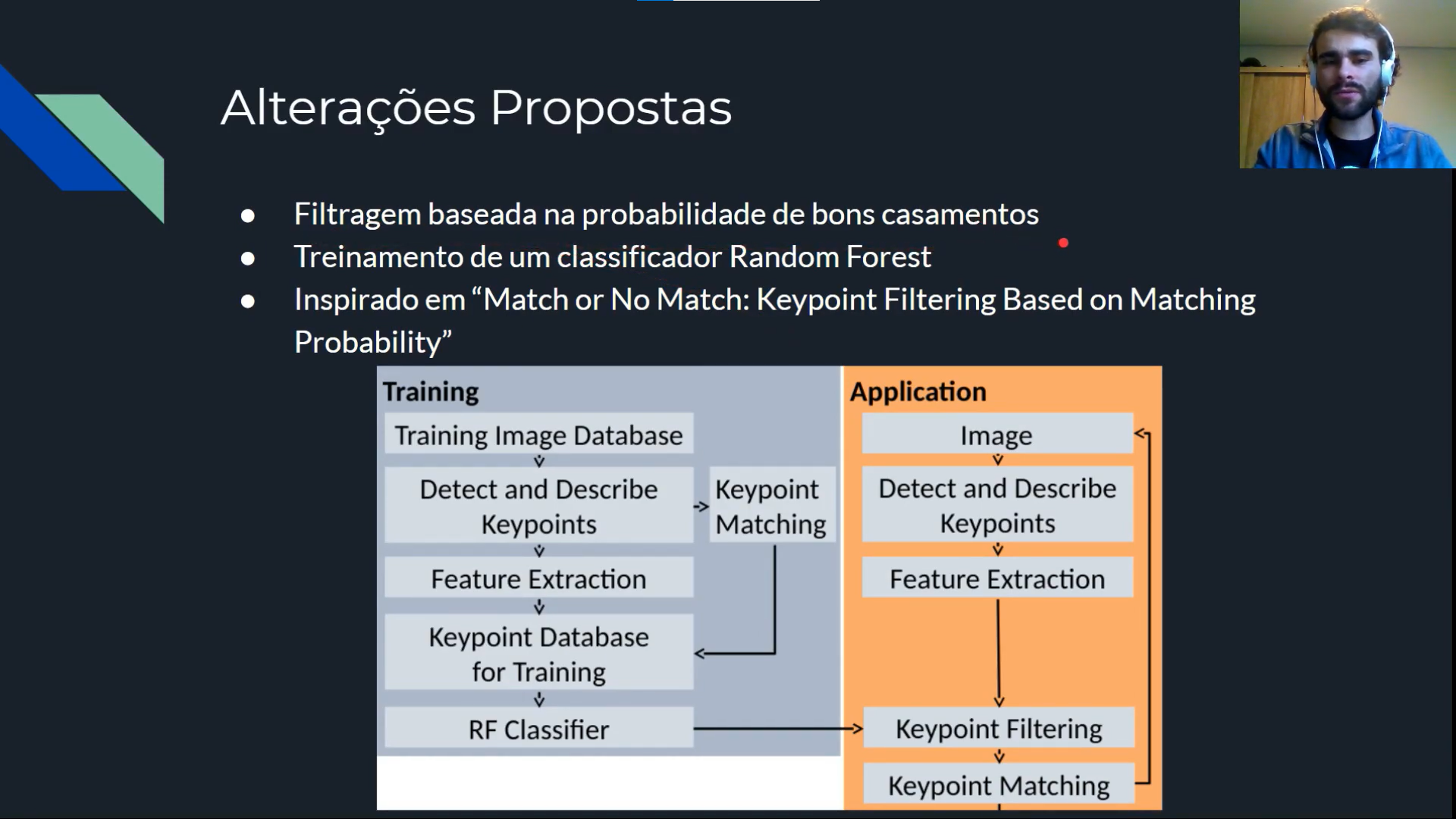
- Final Presentation Video: link (or click the image below)


- GitHub Repo: link
- GitHub Repo: link


- GitHub Repo: link
- GitHub Repo: link
- GitHub Repo: link